OpenHLM: An Empirical Recipe for Whole-Body Humanoid Loco-Manipulation
Yingdong Hu*, Haodong Zhu*, Boyuan Zheng*, Yihang Hu*, Tong Zhang*, Zunhao Chen, Junming Zhao, Ruiqian Nai, Yang Gao
arXiv preprint, 2026
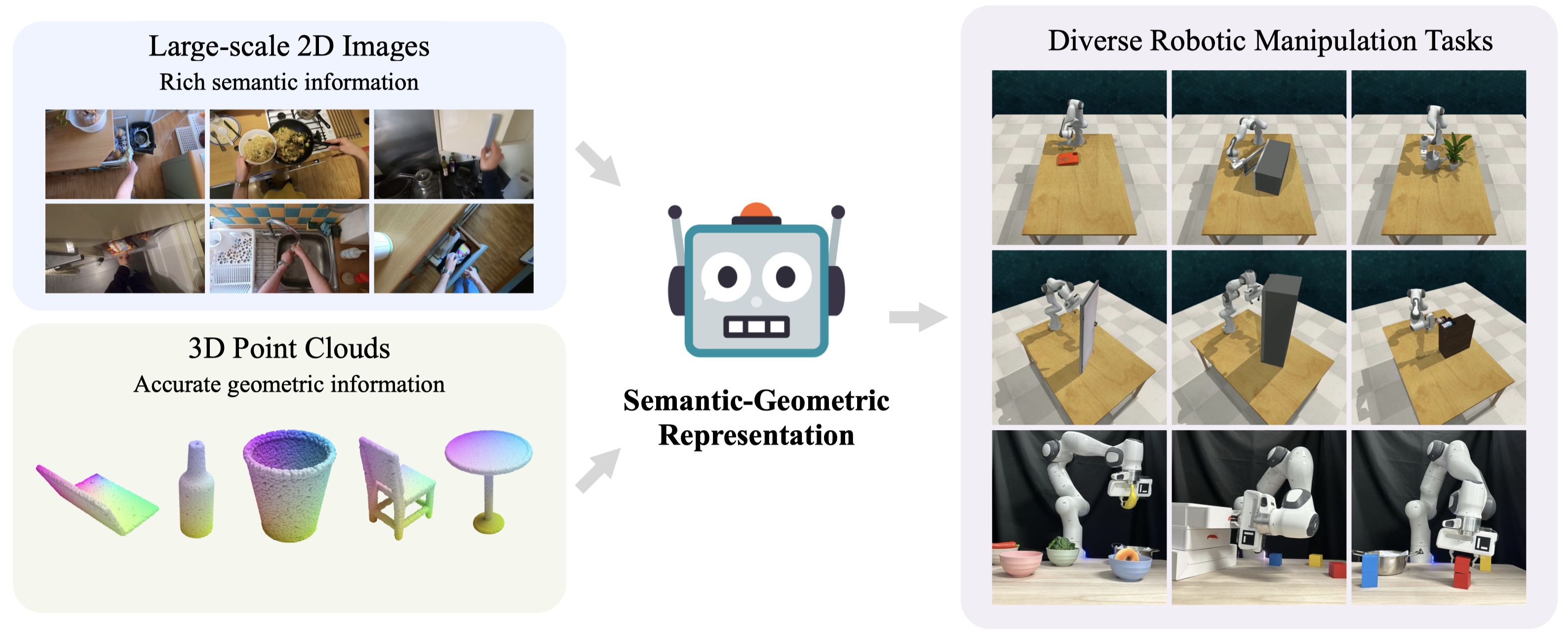
A recipe for whole-body humanoid loco-manipulation, turning a language instruction and the robot's observations into coordinated motion across every degree of freedom.